Theo mô tả của nghiên cứu đăng trên tạp chí Science Robotics, đây là loại robot bán thân, điều khiển từ xa và được gắn thêm hai chân.
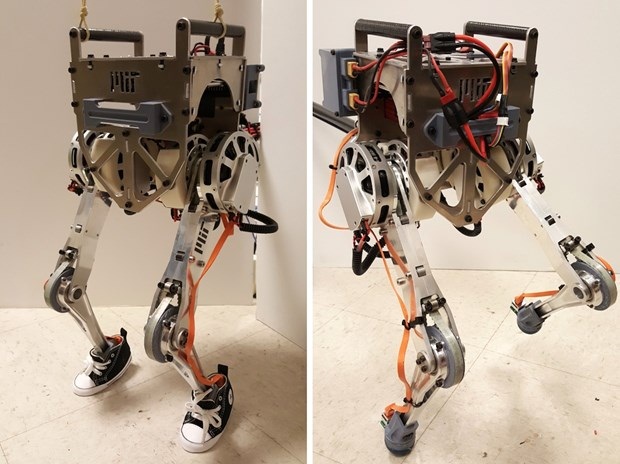
Robot bán thân, điều khiển từ xa và được gắn thêm hai chân. (Nguồn: spectrum.ieee.org)
Các kỹ sư Mỹ vừa phát triển một phương pháp giúp robot hai chân có thể di chuyển cân bằng được như người, qua đó mở ra triển vọng cho việc để robot thay con người thực hiện các nhiệm vụ tại những môi trường khó khăn.
Nghiên cứu trên đã được đăng trên tạp chí Science Robotics. Theo mô tả của nghiên cứu, đây là loại robot bán thân, điều khiển từ xa và được gắn thêm hai chân.
Người điều khiển sẽ mặc một áo vest để truyền thông tin về chuyển động và các lực phản ứng của con người lên mặt đất sang robot. Nhờ có chiếc áo vest, người điều khiển vừa có thể trực tiếp ra lệnh cho robot và vừa có thể cảm nhận được chuyển động của robot. Ví dụ, nếu robot bắt đầu có xu hướng bị lật, người điều khiển sẽ cảm thấy một lực kéo ở áo vest và có thể đồng thời điều chỉnh độ cân bằng của robot.
Nhà nghiên cứu Joao Ramos của Viện Công nghệ Massachusetts (MIT) cho biết khi muốn mở một cánh cửa nặng, người điều khiển có thể ra lệnh cho robot nghiêng về phía cửa và đẩy nó mở ra, mà không bị mất thăng bằng.
Ông Ramos phát hiện ra rằng sự cân bằng được quyết định bởi sự tương quan giữa khối tâm và tâm áp lực của một người. Vị trí của hai nhân tố này có thể được thể hiện qua một quả lắc ngược, với đỉnh của nó đại diện cho khối tâm của con người và đáy của nó là tâm áp lực trên mặt đất.
Tiếp đó, các nhà nghiên cứu phát triển một thuật toán dựa trên mô hình quả lắc, để kết nối phản ứng giữa con người và robot.
Các nhà nghiên cứu hiện đang lên kế hoạch phát triển robot có hình dáng giống con người với cách kiểm soát cân bằng tương tự, với hy vọng robot có thể chạy qua vùng thảm họa và đẩy được vật cản trong nhiệm vụ cứu hộ./.
Theo Đặng Ánh (TTXVN/Vietnam+)
https://www.vietnamplus.vn/my-phat-trien-robot-hai-chan-co-the-di-chuyen-can-bang-duoc-nhu-nguoi/605366.vnp